




Коллаборативный робот FR3, с максимальной полезной нагрузкой 3 кг., досягаемостью 622 мм. Каждое соединение робота оснащено двумя энкодерами, что позволяет достичь высокой точности позиционирования. Интуитивно понятно интерфейс ЧМИ с графической блок-схемой, виртуальной моделью робота и системой координат. Программирование робота может быть выполнено с ноутбука, планшета, пульта обучения c дисплеем 10,1” (опция). Открытая операционная платформа облегчает использование роботов в различных сферах применения:
- Сборка
- Перемещение грузов
- Нанесение клея, герметика
- Мех. обработка, шлифовка
- Маркировка
- Решение для образования и пр.
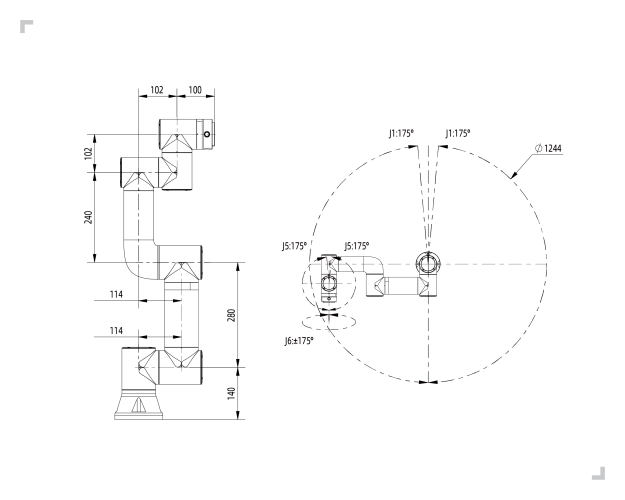
Технические характеристики:
|
Грузоподъемность |
3 кг |
|
Досягаемость |
622 мм |
|
Степени свободы |
6 |
|
ЧМИ |
Пульт обучения 10.1”, ноутбук, планшет, приложение APP |
|
Повторяемость |
±0.02 мм |
|
Перемещение оси |
Рабочий диапазон Максимальная скорость |
|
1 Ось |
±175° ±180°/s |
|
2 Ось |
+85°/-265° ±180°/s |
|
3 Ось |
±150° ±180°/s |
|
4 Ось |
+85°/-265° ±180°/s |
|
5 Ось |
±175° ±180°/s |
|
6 Ось |
±175° ±180°/s |
|
Скорость передачи данных (тип) |
1 m/s |
|
Степень защиты |
IP54 (Опц. IP66) |
|
Уровень шума |
<65dB |
|
Установка робота (пространственное положение) |
Любое положение |
|
I/O |
(DI) 2 (DO) 2 |
|
|
(AI) 1 (AO) 1 |
|
Источник питания |
24В/1.5A |
|
Протокол |
I/0, TCP/IP,Modbus_TCP/RTU, Profinet |
|
Среда разработки/программирования |
C#/C++/Python/java/ROS |
|
Диаметр основания крепления робота |
130 мм |
|
Вес |
15 кг |
|
Рабочая температура |
0-45 |
|
Влажность |
90% RH(без-конденсата) |
|
Материалы |
Алюминий, сталь |







Поделиться с друзьями: